BQ-NCO Bisimulation Quotienting for Efficient Neural Combinatorial Optimization
BQ-NCO:高效神经组合优化的双模拟分法(Bisimulation Quotienting不知道中文怎么翻译)
来自Naver Labs Europe
摘要
尽管基于神经的组合优化方法在端到端启发式学习中取得了成功,但分布外泛化仍然是一个挑战。在本文中,我们提出了一种新的组合优化问题(cop)作为马尔可夫决策过程(mdp)的公式,它有效地利用了cop的共同对称性来提高分布外鲁棒性。从一种构造方法的直接MDP公式出发,我们引入了一种基于MDP中的双模拟商(BQ)的通用方法来减少状态空间。然后,对于具有递归性质的cop,我们专门进行了双模拟,并展示了简化状态如何利用这些问题的对称性并促进MDP求解。我们的方法是有原则的,我们证明了所提议的BQ-MDP的最优策略实际上解决了相关的cop。我们举例说明了我们的方法在五个经典问题:欧几里得和非对称的旅行推销员,有能力的车辆路线,定向和背包问题。此外,对于每个问题,我们为bqmdp引入了一个简单的基于注意力的策略网络,我们通过模仿来自单个分布的小实例的(接近)最优解来训练它。我们在合成基准和现实基准上为五个cop获得了最新的最先进的结果。值得注意的是,与大多数现有的神经方法相比,我们学习的策略在没有任何额外搜索过程的情况下,对比训练期间看到的更大的实例表现出出色的泛化性能。我们的代码可在:url。
贡献
总而言之,我们的贡献如下:
- 我们提出了一个通用的和原则性的框架,可以在最低要求的情况下推导出任何COP的直接MDP;
- 我们提出了一种通过以对称为中心的双模拟引用来减少直接MDPs的方法,并定义了递归cop类的显式双模拟;
- 我们为bqmdp设计了一个适当的基于变压器的架构,仅对TSP(欧几里得和非对称版本),CVRP, OP和KP进行了轻微的调整;
- 我们在这五个问题上实现了最先进的泛化性能,显著优于其他基于神经的构造方法。
CO as a MDP
定义了一个COP为,
\[\min_{x\in X}f(x)\]$X$ 是有限非空可行解,$f$ 是目标函数。
解空间
解空间定义为 $(\mathcal{X},\circ,\epsilon,\mathcal{Z})$
- $\mathcal{X}$ 是所有部分解的集合
- $\circ$ 表示一种运算,$x\circ y$ 表示部分解 $x$ 的后面拼接部分解 $y$
- $\epsilon$ 表示空解
- $\mathcal{Z}\subset\mathcal{X}$ 表示一步解的集合
$\mathcal{X}$ 的任何元素都有有限正数的阶跃分解:
\[\forall x\in{\mathcal X},0<|\lbrace z_{1:n}\in{\mathcal Z}^{n}:x=z_{1}\circ\cdots\circ z_{n}\rbrace|<\infty.\]直接MDP
直接MDP $\mathcal{M}_{(f,X)}$,
-
state space:$\bar{X}=\lbrace x{\in}{\mathcal X}:\exists y{\in}{\mathcal X},x{\circ}y{\in}X\rbrace$
-
action space:$\mathcal{Z}\cup\lbrace\epsilon\rbrace$
-
转移:

箭头上方表示动作,箭头下方表示奖励
$\mathcal{F}_{\mathcal{X}}$ 为 $(f,X)$ 实例的集合。
直接MDP满足三个性质:
- 动作有限
- 对于任何状态总存在一个可行动作
- 涉及阶跃作用的过渡次数是有限的
作者证明了这个直接MDP的完备性。
Bisimulation Quotienting
状态信息和对称性
作者观察,随着解的构造过程的推进,状态信息会越来越多,而动作空间会越来越小,这使得状态信息的复杂性和决策的复杂性不匹配(如构造TSP,已有解越来越长,包含的信息越来越多,但动作选择却越来越简单)。
因此,作者构造了一个规约算子

事实上,$(f\ast y,X\ast y)$ 是给定部分解 $y$ 后的尾部子问题。在TSP中,相当于给定了一个前缀解$y$,$y$的最后一个节点是$e$,尾部子问题相当于找到从$e$开始到仓库的一条路径。这样使得,只要子问题的尾部是$e$,且未访问的节点集合是一样的,那么问题就是对称的。
Bisimulation Quotiented MDP
根据规约算子,构造规约MDP $\mathcal{M}$:
-
状态空间:$\mathcal{F}_{\mathcal{X}}$
-
动作空间:$\mathcal{Z}\cup\lbrace\epsilon\rbrace$
-
转移

映射
\[\Phi_{(f,X)}{:}\bar{X}\mapsto\mathcal{F}_{\mathcal{X}}\]是 $\mathcal{M}$ 和 $\mathcal{M}_{(f,X)}$ 的bisimulation(应该是叫做双模拟)。
形式上,$\mathcal{M}$ 通过双模拟与直接MDP的商同构,因此称为双模拟商(BQ-)MDP(Bisimulation Quotiented (BQ-)MDP)。
作者证明了BQ-MDP的完备性。
在模型结构上的作用
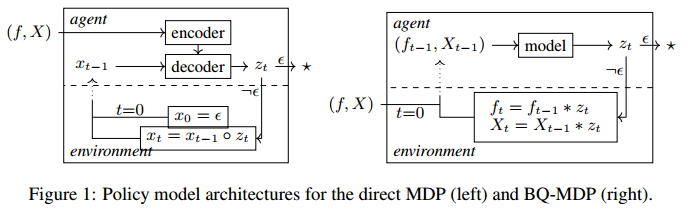
虽然直接和BQ-MDP在解决其相关COP方面是等同的,但它们的实际解释导致了重大差异。在直接MDP中,单独学习每个特定于实例的MDP是没有意义的。相反,学习基于输入实例的通用MDP,类似于目标条件强化学习。一个典型的策略模型架构由一个编码器和一个解码器组成,编码器负责计算输入实例的嵌入,解码器采用实例嵌入和当前的部分解决方案来计算下一个动作(图1左),例如注意力模型或PointerNetworks。在轨迹的rollout中,编码器只需要调用一次,因为实例在整个rollout过程中不会更改。对于BQ-MDP,整个解空间只学习了一个无条件的MDP。该模型可以更简单,因为编码器和解码器之间的区别消失了(图1右)。另一方面,在rollout的每一步都必须将整个模型应用到一个新的输入实例。
实例参数化和递归
为了实现BQ-MDP,一个关键要求是 $(f\ast y,X\ast y)$ 可以在与 $(f, X)$ 相同的参数空间中表示。事实上,对于满足尾部递归属性的COP来说就是这样:在对实例应用了许多构造步骤之后,剩余的尾部子问题本身就是原始COP的一个实例。这是CO中一个非常常见的性质,特别是包括动态规划的最优性原则:所有适合动态规划的问题都满足尾递归性质。对于这些尾递归cop,双模拟只是将部分解映射到它所引起的尾子问题实例。
作者举例了背包问题和path-TSP(最短路径问题)。
策略学习
网络架构
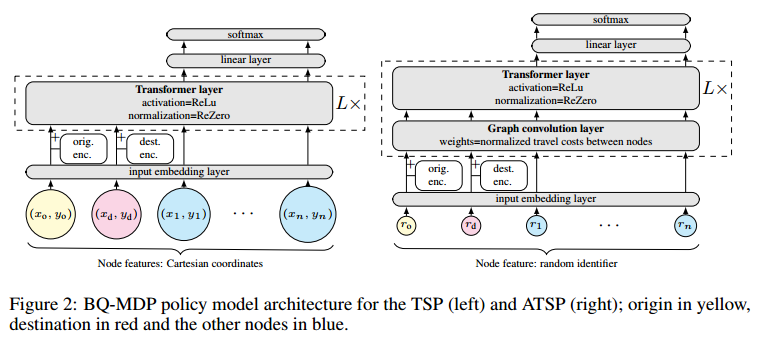
左侧是TSP,右侧是非对称TSP,$r_i$ 表示节点的标识嵌入。
轨迹生成
监督学习,交叉熵损失。
文章提到TSP和VSP可能的解不止一个,有一些是甚至是对称的,因此最优解不是直接以轨迹的形式出现的,即构造步骤的序列。
文章还提到固定轨迹解的任何子序列都可以解释为子实例的解。请注意,这些子实例在大小和节点分布上都是不同的,因此通过对它们进行训练,我们隐含地鼓励模型在大小和节点分布上都能很好地工作,并且比在训练期间没有看到这些变化时泛化得更好。
以上是省流版,感觉我没太搞懂,原文如下:
轨迹生成。我们通过模仿专家轨迹来训练我们的模型,使用交叉熵损失。这些轨迹是从预先计算的(接近)最优解中提取的,用于相对较小和固定大小的实例。即使对于困难的问题,我们也利用了这样一个事实,即通常可以有效地解决小实例(例如使用MILP求解器)。当然,学到的政策的质量将在更大的、因此更具挑战性的情况下进行评估。请注意,最优解不是直接以轨迹的形式出现的,即构造步骤的序列。虽然提案2保证任何解决方案都存在一个轨迹,但它通常不是唯一的。在TSP中,最优旅行对应于两个可能的轨迹(一个与另一个相反)。在CVRP中,每个子游类似地对应两个可能的轨迹,并且子游的不同顺序导致不同的轨迹。我们注意到这个最终顺序对性能有影响(见附录E.3)。另一方面,固定轨迹解的任何子序列都可以解释为子实例的解。请注意,这些子实例在大小和节点分布上都是不同的,因此通过对它们进行训练,我们隐含地鼓励模型在大小和节点分布上都能很好地工作,并且比在训练期间没有看到这些变化时泛化得更好。
复杂度
对于规模为 $N$ 的问题,模型的复杂度是 $O(N^3)$,使用的transformer的复杂度是 $O(N^2)$。复杂度的瓶颈在Transformer。
相关工作
- CO的通用框架:混合整数规划和约束规划,作者是第一个证明我们提出的MDP和求解COP之间的等价性的方法
- 基于神经网络的启发式构造方法:AM、POMO、GCN、DIFUSCO
- Step-wise approaches:每次算出一个子环后重新编码
- 泛化NCO:蒙特卡洛树搜索、元学习、考虑对称性、分治方法
实验评估
问题:TSP、CVRP、OP、ATSP,附录中还有背包。
在100规模上训练,泛化到100、200、500、1k上评估,有合成数据集和标准数据集。
参数
9层Transformer,每层12个注意力头,监督学习,交叉熵损失。
TSP的解来自Concorde求解器,ATSP和CVRP是LKH,op是EA4OP启发式,数据集大小100w。
提到了上述没说明白的有多个解的问题,对每个实例,他提取了实例中的一些子节点构成子问题,得到了增强数据集。
为了从该数据集中采样轨迹,我们注意到,在TSP的情况下,最优巡回的任何子路径也是相关path-TSP子问题的最优解,因此适用于我们的path-TSP模型。因此,我们通过首先采样4到n之间的数字n(少于4个节点的path- tsp问题是平凡的)来形成小批量,然后从初始解集中采样长度为n的子路径。在每个epoch,我们从每个解中采样一个子路径。通过对最优解的所有可能中缀的子序列进行采样,我们自动得到一个增强的数据集,而以前的一些模型必须明确地为其设计模型。我们对CVRP、OP和KP使用了类似的采样策略。形成大小为1024的批次,并训练模型500次。我们使用Adam作为优化器,初始学习率为7.5e−4,每50次迭代衰减0.98。
baseline
与以下方法进行了比较:OR-Tools[37]、LKH[17]和Hybrid Genetic Search (HGS) for CVRP[44]作为SOTA非神经方法;DIFUSCO+2opt、at - gcn +MCTS和SGBS混合方法;AM、TransformerTSP、MDAM、POMO、DIMES和syn - nco是基于深度学习的构建方法。
结果
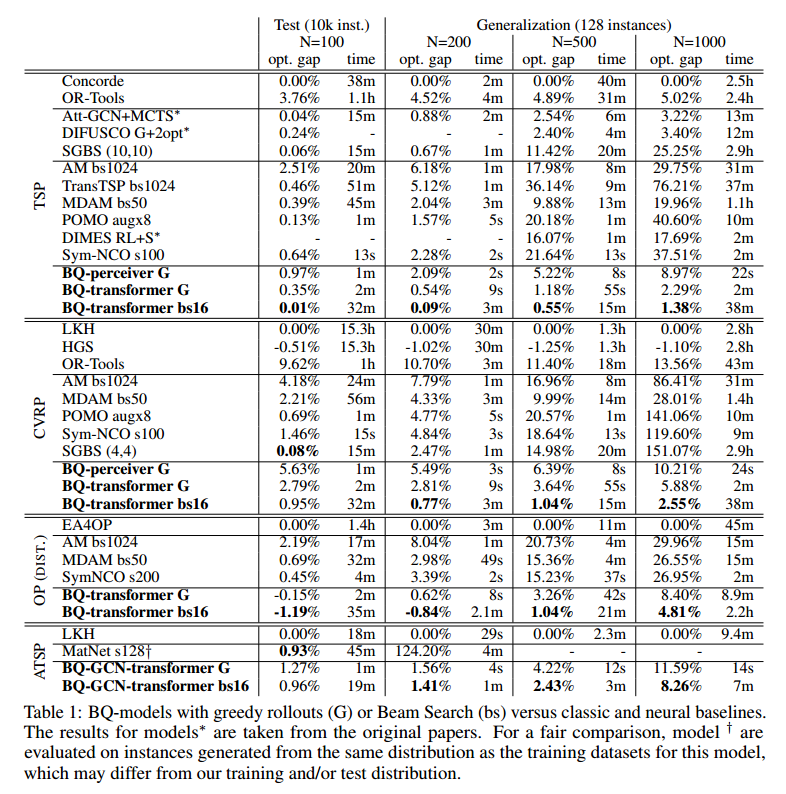
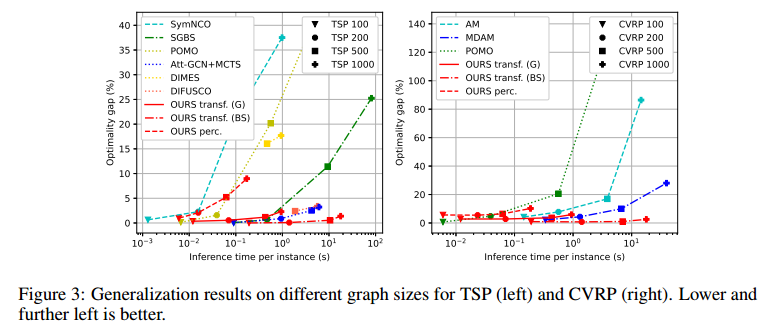
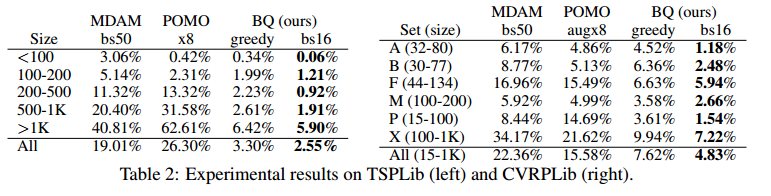
泛化性能很好,运行时间尚可。
总结
对于很容易确保解的可行性的问题还不错,但是对于约束比较多的问题就有挑战性。
将框架从确定性cop扩展到随机cop将特别有趣。
附录没看,附录里面特别多东西。
\begin{table}[!t]
\small
\centering
% \caption{The figure illustrates the instance number of the standard dataset, the number of nodes in each instance (with data distribution corresponding to the instance number’s name, e.g., ``lr101” indicates instance 01 with data distribution lr1), the objective function value and route count obtained by the LKH3 solver (with the same parameter settings as the comparative experiments), the objective function value and route count obtained by TSTE, and the Gap between the objective function values of the solutions obtained by TSTE and LKH3.}
\caption{The comparison results between our TSTE and LKH3 on the benchmark instances.}
\label{tab:stardand}
\begin{tabular}{|ll|l|ll|ll|}
\hline
Instance & Scale & LKH3 Obj. & Heu Obj. & Heu Gap & TSTE Obj. & TSTE Gap \ \hline
lr101 & 107 & 16.508 & 17.493 & 5.97\% & 17.206 & 4.23\%
lr102 & 111 & 14.876 & 15.61 & 4.94\% & 15.720 & 5.68\%
lr103 & 105 & 12.927 & 13.332 & 3.14\% & 13.658 & 5.66\%
lr104 & 105 & 10.134 & 11.095 & 9.48\% & 10.224 & 0.89\%
lr105 & 107 & 13.771 & 14.273 & 3.64\% & 14.015 & 1.77\%
lr106 & 105 & 12.526 & 12.981 & 3.63\% & 12.772 & 1.96\%
lr107 & 105 & 11.113 & 11.113 & 0.00\% & 11.960 & 7.62\%
lr108 & 101 & 9.690 & 10.374 & 7.06\% & 9.823 & 1.37\%
\multicolumn{7}{|c|}{} \ \hline
lrc101 & 107 & 17.0321 & ~ & ~ & 18.0904 & 6.21\%
lrc102 & 107 & 15.5807 & ~ & ~ & 16.0479 & 3.00\%
lrc103 & 107 & 12.5874 & ~ & ~ & 13.1927 & 4.81\%
lrc104 & 109 & 11.2840 & ~ & ~ & 13.4021 & 18.77\%
lrc105 & 109 & 16.7966 & ~ & ~ & 16.9299 & 0.79\%
lrc106 & 107 & 14.7893 & ~ & ~ & 14.9046 & 0.78\%
lrc107 & 107 & 12.3015 & ~ & ~ & 12.7734 & 3.84\%
lrc108 & 105 & 11.4743 & ~ & ~ & 12.5843 & 9.67\% \ \hline
\end{tabular}
\end{table}