1 实验环境
操作系统: Windows 11
Python:Python 3.8.6
2 实验任务
2.1 图像分类任务
图像分类任务的目标是根据图像信息中所反映的不同特征,把不同类别的图像区分开来。从已知的类别标签集合中为给定的输入图片选定一个类别标签。
2.2 MNIST数据集
MNIST 数据集来自美国国家标准与技术研究所,National Institute of Standards and Technology(NIST)。训练集由来自 250 个不同人手写的数字构成,其中 50% 是高中学生,50% 来自人口普查局的工作人员。测试集也是同样比例的手写数字数据。
MNIST 数据集可在 http://yann.lecun.com/exdb/mnist/ 获取,它包含了四个部分:
- Training set images: train-images-idx3-ubyte.gz (9.9 MB, 解压后 47 MB, 包含 60,000 个样本)
- Training set labels: train-labels-idx1-ubyte.gz (29 KB, 解压后 60 KB, 包含 60,000 个标签)
- Test set images: t10k-images-idx3-ubyte.gz (1.6 MB, 解压后 7.8 MB, 包含 10,000 个样本)
- Test set labels: t10k-labels-idx1-ubyte.gz (5KB, 解压后 10 KB, 包含 10,000 个标签)
images中每个图片的大小是28x28,每个数值代表了一个像素值,值域是0到255,表示一个手写字;labels中每个标签是一个int类型的数值,表示手写字的数值。
2.3 实验目的
- 掌握pytorch等深度学习框架的环境搭建
- 掌握图像分类任务的训练和测试流程
3 实验设计
3.1 构建数据集及数据预处理
3.1.1 数据预处理
导入数据集的方式有很多。最简单的一种就是直接调用PyTorch封装好的函数。因为PyTorch里包含了 MNIST, CIFAR10 等常用数据集,调用 torchvision.datasets 即可把这些数据由远程下载到本地,下面给出MNIST的使用方法:
torchvision.datasets.MNIST(root, train=True, transform=None, target_transform=None, download=False)
- root 为数据集下载到本地后的根目录,包括 training.pt 和 test.pt 文件
- train,如果设置为True,从training.pt创建数据集,否则从test.pt创建。
- download,如果设置为True, 从互联网下载数据并放到root文件夹下
- transform, 一种函数或变换,输入PIL图片,返回变换之后的数据。
- target_transform 一种函数或变换,输入目标,进行变换。
因此,简单地使用datasets.MNIST即可导入训练集和测试集。
# 训练集导入
data_train = datasets.MNIST(root='data/', transform=transform, train=True, download=True)
# 数据集导入
data_test = datasets.MNIST(root='data/', transform=transform, train=False)
当然我觉得这么做很没有意思,我想自己看看这数据集是什么内容。于是我直接下载了该数据集,得到如下文件:

既然要手工处理,那首先得把二进制文件转换成既方便存储,又方便读取,我们还能够看得懂的文件,那么csv格式当仁不让。因此,实现了一个函数,用于读取二进制文件,并写入csv文件。
# utils.py
def convert(img_file, label_file, out_file, n):
'''
用于将数据集和标签转换成csv格式
img_file 数据集的路径
label_file 标签的路径
out_file 需要存储的csv的路径
'''
if os.path.isfile(out_file):
return
f = open(img_file, "rb")
l = open(label_file, "rb")
o = open(out_file, "w")
f.read(16)
l.read(8)
images = []
print("Generator " + out_file + " ...")
for i in tqdm(range(n)):
image = [ord(l.read(1))]
for j in range(28 * 28):
image.append(ord(f.read(1)))
images.append(image)
for image in images:
o.write(",".join(str(pix) for pix in image) + "\n")
f.close()
o.close()
l.close()
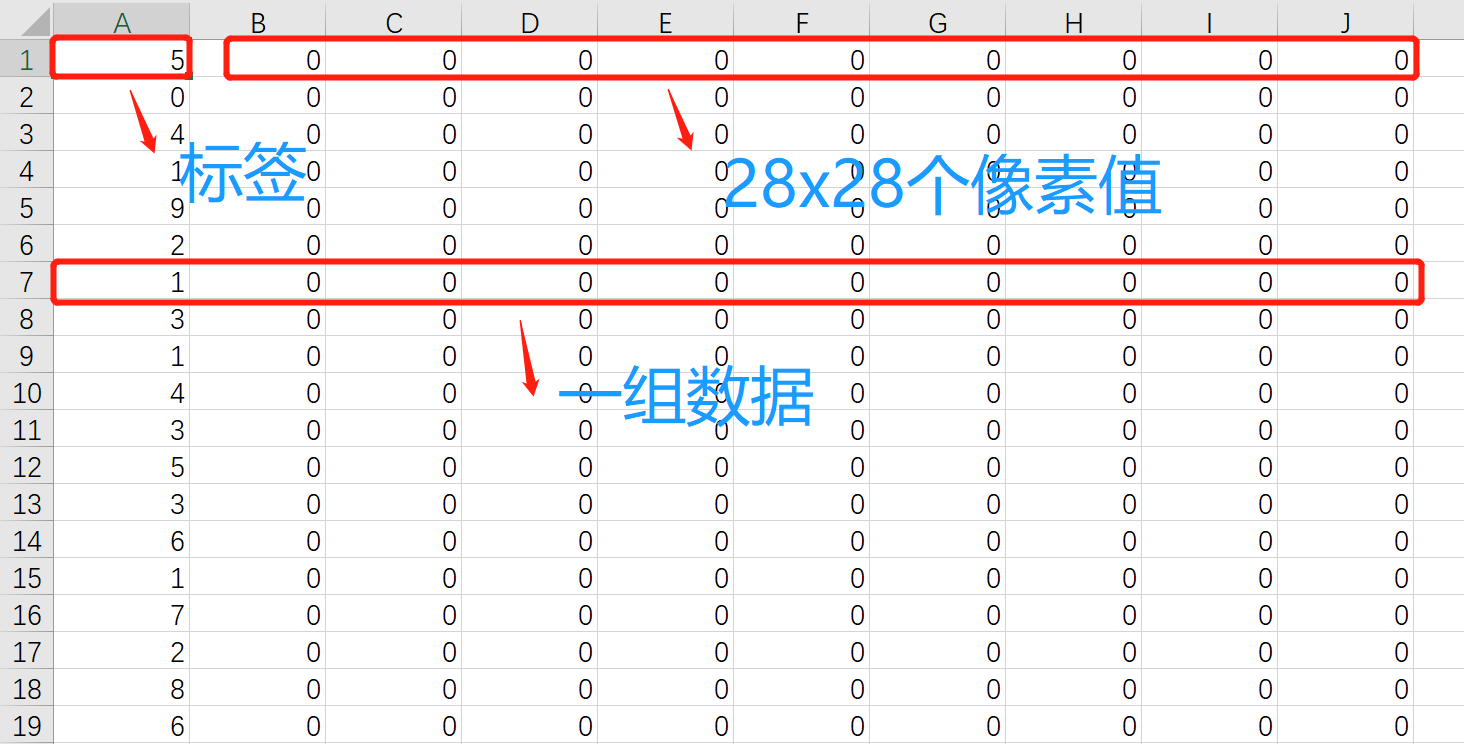
csv中的每一行都代表一个数据,其中第一维是标签,后面的28x28维是数据,也就是图片的像素值。csv的格式如下:
然后将数据集和测试集都进行转换:
# predata.convert_data()
convert(train_images_path, train_labels_path, data_path, 60000)
convert(test_images_path, test_labels_path, test_path, 10000)
得到如下结果:

接下来,我们可以采样一个数据,看看图片的内容。
# utils.py
def sample_data(source):
'''
用于采样一个数据集
source 数据集路径(csv)
'''
csv_file = csv.reader(open(source))
for content in csv_file:
content = list(map(float, content))
feature = content[1:785]
return feature
然后展示该图片:
# predata.convert_data()
feature = sample_data(data_path)
b = np.array(feature).reshape(28,28)
img = Image.fromarray(np.uint8(b))
img.show()
可以看到,由于是28x28的图片,图片非常小:
3.1.2 构建数据集
Pytorch提供了许多方法使得数据读取和预处理变得很容易。
torch.utils.data.Dataset是代表自定义数据集方法的抽象类,通过继承这个抽象类来定义数据集。一般来说,只需要定义__len__和__getitem__这两个方法就可以。
而通过继承torch.utils.data.Dataset的这个抽象类,定义好数据类后,我们需要通过迭代的方式来取得每一个数据,但是这样很难实现取batch,shuffle或者多线程读取数据,所以pytorch还提供了一个简单的方法来做这件事情,通过torch.utils.data.DataLoader类来定义一个新的迭代器,用来将自定义的数据读取接口的输出或者PyTorch已有的数据读取接口的输入按照batch size封装成Tensor,后续只需要再包装成Variable即可作为模型的输入。
因此, 我们首先需要定义两个Dateset,分别表示训练集和测试集:
# predata.py
class data_train(Dataset):
'''
train dataset
'''
def __init__(self):
self.x = load_data(data_path)
def __getitem__(self, idx):
assert idx < len(self.x)
return self.x[idx]
def __len__(self):
return len(self.x)
class data_test(Dataset):
'''
test dataset
'''
def __init__(self):
self.x = load_data(test_path)
def __getitem__(self, idx):
assert idx < len(self.x)
return self.x[idx]
def __len__(self):
return len(self.x)
其中,加载数据的部分如下:
# utils.py
def load_data(source):
csv_file = csv.reader(open(source))
data = []
for content in csv_file:
content = list(map(float, content))
feature = torch.tensor(content[1:785]).reshape(1,28,28)
feature = feature / 255 * 2 - 1
label = int(content[0])
data.append((feature, label))
return data
其中有很关键的一步,就是对数据进行归一化处理。由于输入像素的值域是0到255,而实际上我们希望数据服从均值为0,方差维1的分布。因此,手动实现了一个很简陋的归一化操作。当然,torchvision.transforms中有一个非常方便的方法可以处理:
transform = transforms.Compose([
transforms.ToTensor(), # 把数据转换为张量(Tensor)
transforms.Normalize( # 标准化,即使数据服从期望值为 0,标准差为 1 的正态分布
mean=[0.5, ], # 期望
std=[0.5, ] # 标准差
)
])
至此,数据集加载的整个流程已经完成。
# minist.py
convert_data() # 将数据集转换成csv
data_train = data_train() # 训练集导入
data_test = data_test() # 数据集导入
dataloader_train = DataLoader(dataset=data_train, batch_size=64, shuffle=True) # 训练集装载
dataloader_test = DataLoader(dataset=data_test, batch_size=64, shuffle=True) # 数据集装载
数据集加载完成后,我们可以浏览一下加载的数据,进行简单的核查:
# minist.py
images, labels = next(iter(dataloader_train))
img = make_grid(images)
img = img.numpy().transpose(1, 2, 0)
mean = [0.5, 0.5, 0.5]
std = [0.5, 0.5, 0.5]
img = img * std + mean
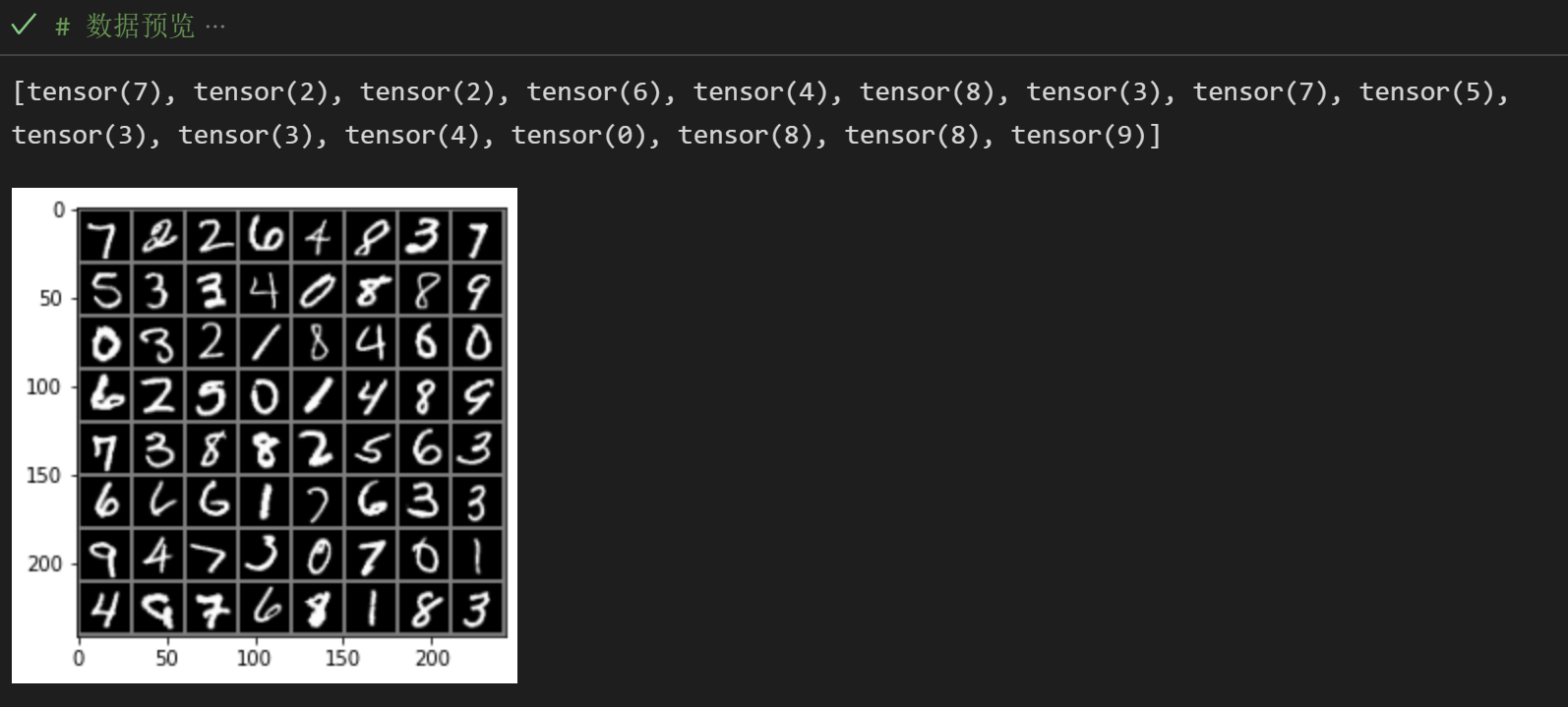
print([labels[i] for i in range(16)])
plt.imshow(img)
plt.show()
还原得到如下图像:
3.2 网络设计和参数优化
3.2.1 网络设计
对于图像处理,一般使用卷积神经网络。MNIST是一个很简单的数据集,图片大小为28x28,因此使用普通的卷积神经网络就能取得不错的效果。
网络的基本结构为两层的卷积层和一层的全连接层。
第一层的卷积层如下所示:
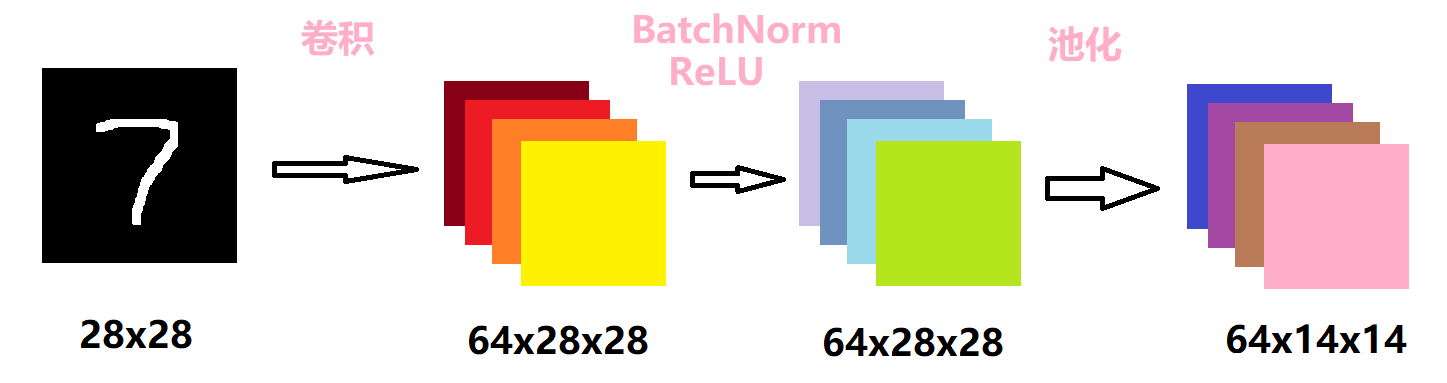
首先对原图像做一个卷积核大小为3的卷积操作。由于输入的图片是黑白图片,只有一个通道,因此卷积的输入通道为1,输出通道为64。设置了padding为1,而卷积核的大小是3,因此输出的维度会和输入的维度相同。
接着对卷积的结果做归一化操作后,经过一个ReLU激活函数,这两步不会改变数据的维度。选择ReLU的原因很简单,由于数据集很简单,而该激活函数本身的计算很简单,节约了计算成本。
最后再做一个kernel大小为2的池化操作,设置步长为2,因此数据大小会缩小一半。池化层的作用主要是下采样,可以降维、去除冗余信息、对特征进行压缩、简化网络复杂度、减小计算量、减小内存消耗等等。简单来说,就是减少计算量。
# net.py
# 第一层卷积层
self.conv1 = Sequential(
nn.Conv2d(in_channels=1, out_channels=64, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2)
)
接着再堆叠一层卷积层。
# net.py
# 第二卷积层
self.conv2 = Sequential(
nn.Conv2d(in_channels=64, out_channels=128, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(128),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2)
)
步骤是类似的,输入的维度是64x14x14,输出维度为128x7x7。
堆叠多层卷积层的原因是,则随着层次加深,提取的信息也愈加复杂、抽象。可以理解为,神经元一层一层的堆积后,对图片内容的理解会更加抽象和深刻。
最后需要经过一个全连接层,将这128x7x7维度的信息转换成我们需要的输出标签。具体的结构如下:
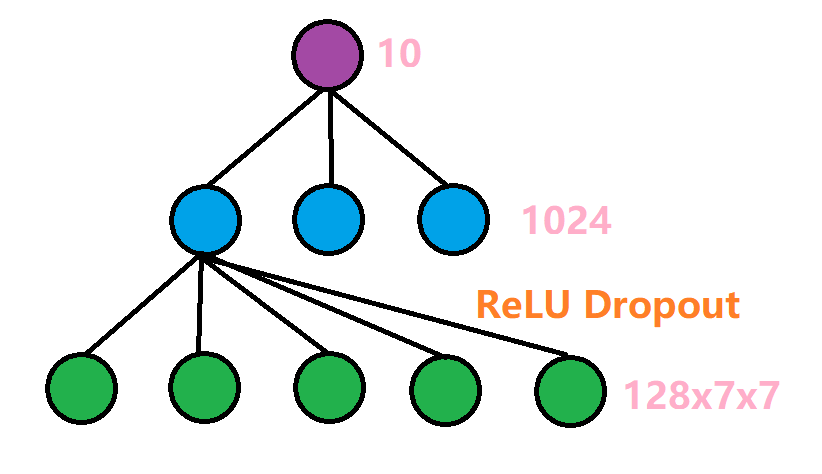
先由一个线性传播层,将128x7x7的信息转化为维度为1024的隐藏层,再经过ReLU激活函数,以及Dropout操作。Dropout操作是会随机选择一些单元丢弃,我们设置的概率为0.5,也就是会丢弃一般的信息,目的是为了防止过拟合。
# net.py
# 全连接层
self.dense = Sequential(
nn.Linear(7 * 7 * 128, 1024),
nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(1024, 10)
)
最后,将这三层网络堆叠起来,并重写一个前向传播函数,即可实现该网络结构。
# net.py
# 正向传播
def forward(self, x):
x1 = self.conv1(x)
x2 = self.conv2(x1)
x = x2.view(-1, 7 * 7 * 128)
x = self.dense(x)
return x
3.2.2 参数优化
实例化网络后,首先进行GPU优化。使用GPU能显著提高训练速度。
# minist.py
cnn = CNN()
if torch.cuda.is_available(): # 判断是否有可用的 GPU 以加速训练
cnn = cnn.cuda()
接着设置损失函数。损失函数我们使用分类任务中最常用的交叉熵损失函数。
# minist.py
loss_F = nn.CrossEntropyLoss() # 设置损失函数为 CrossEntropyLoss(交叉熵损失函数)
优化器我们使用最常用的Adam优化器。
# minist.py
optimizer = torch.optim.Adam(cnn.parameters(), lr=lr) # 设置优化器为 Adam 优化器
Adam优化器可以直白理解成RMSProp+Momentum,也就是动量梯度下降加上指数移动平均。动量梯度下降是仿照现实世界中物体的惯性,在运动时不仅要看当前这一步往哪里迈,还要考虑之前的运动状态,如果之前的步伐很快,就不应该在一步内急停或者急转弯。这样做的好处是可以跳出一些局部最小值。而RMSProp增加了一个超参数$\alpha$,这种计算梯度均值的方式其实就是指数移动平均,它更能稳定地反映梯度变化情况,且可以通过$\alpha$来调节对之前梯度和当前梯度的重视程度。通过Adam优化器,实现了简单的自适应学习。
3.3 训练和测试
整体训练和测试的框架为:
for epoch in range(epochs):
# 训练
# 测试
# 打印信息
这种架构能够直观地反应出,每次训练后的效果变化。
3.3.1 训练
首先我们设置训练的epoch的数量为10,学习率为0.01。
# env.py
epochs = 10
batch_size = 64
lr = 0.001
接下来结合代码进行解析:
# minist.py
# 训练
running_loss = 0.0 # 一个 epoch 的损失
running_correct = 0.0 # 一个 epoch 中所有训练数据的准确率
print("Epoch [{}/{}]".format(epoch, epochs)) # 打印当前的进度 当前epoch/总epoch数
for data in tqdm(dataloader_train): # 遍历每个数据,并使用tqdm反应训练进度
X_train, y_train = data # data是一个tuple,第一维是训练数据,第二维标签
X_train, y_train = get_Variable(X_train), get_Variable(y_train) # 将数据变成pytorch需要的变量
outputs = cnn(X_train) # 将数据输入进入网络,得到输出结果
_, pred = torch.max(outputs.data, 1) # 输出的结果是一个大小为10的数组
# 我们获取最大值和最大值的索引,后者表示预测结果
optimizer.zero_grad() # 梯度置零
loss = loss_F(outputs, y_train) # 计算输出结果和标签损失
loss.backward() # 根据梯度反向传播
optimizer.step() # 根据梯度更新所有的参数
running_loss += loss.item() # 累计全局的损失
running_correct += torch.sum(pred == y_train.data) # 计算准确率
3.3.2 测试
测试的操作和训练大同小异,直接获取测试集的数据,输入网络中得到结果,并与实际的标签进行比较。由于和训练部分类似,不做具体赘述。
# minist.py
# 测试
testing_correct = 0.0
for data in dataloader_test:
X_test, y_test = data
X_test, y_test = get_Variable(X_test), get_Variable(y_test)
outputs = cnn(X_test)
_, pred = torch.max(outputs, 1)
testing_correct += torch.sum(pred == y_test.data)
最后打印训练信息:损失值(反应训练的效果)、训练集准确度、测试集准确度。
# 打印信息
print("Loss: {:.4f} Train Accuracy: {:.4f}% Test Accuracy: {:.4f}%".format(
running_loss / len(data_train),
100 * running_correct / len(data_train),
100 * testing_correct / len(data_test))
)
之所以需要打印训练集准确度,通过对比测试集准确度,可以观察是否出现过拟合或者是网络设计不当的情况发生。
4 实验结果
训练10个epoch后,得到结果如下:
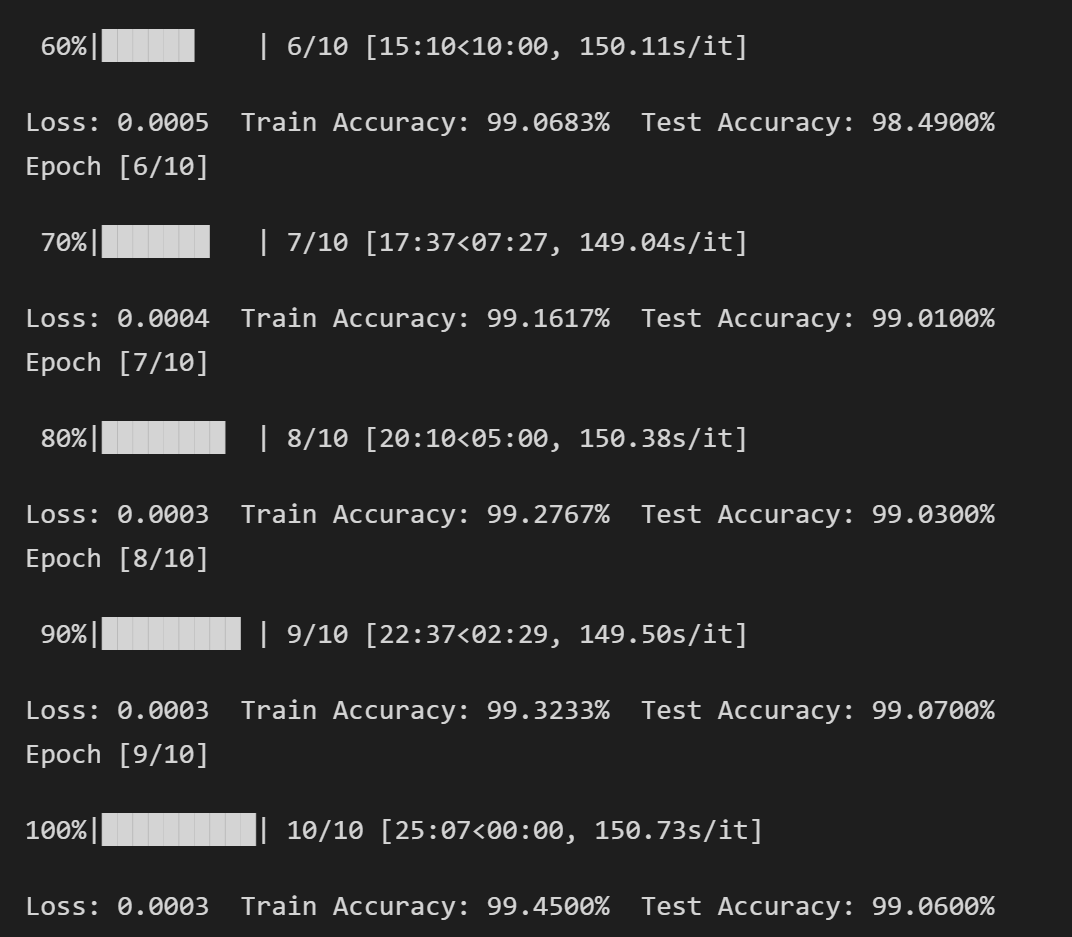
10个epoch后,网络已经基本收敛,测试集的准确度达到了99.06%。
github: https://github.com/Birdie-Go/MINIST