Generalize a Small Pre-trained Model to Arbitrarily Large TSP Instances
将一个小的预训练模型推广到任意大的TSP实例
AAAI2021
代码:https://github.com/Spider-scnu/TSP
(用到的 k-opt 和NIPS23有一篇很相似)
摘要
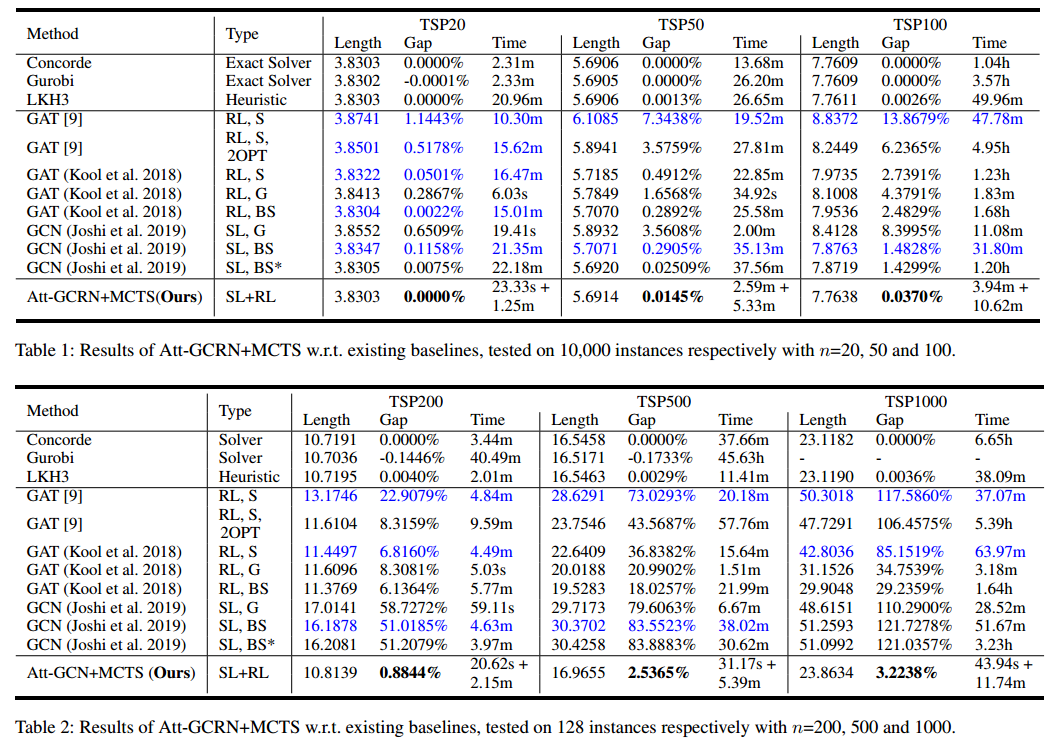
对于旅行商问题(TSP),现有的基于监督学习的算法严重缺乏泛化能力。为了克服这一缺点,本文尝试(以监督的方式)训练一个小规模模型,该模型可以重复用于为任意大尺寸的TSP实例构建热图,基于一系列技术,如图采样,图转换和热图合并。此外,热图被输入到强化学习方法(蒙特卡洛树搜索)中,以指导搜索高质量的解决方案。基于大量实例(多达10,000个顶点)的实验结果表明,这种新方法明显优于现有的基于机器学习的TSP算法,并且显著提高了训练模型的泛化能力。
介绍
贡献
- 首先,基于带有注意机制的图卷积残差网络(AttGCRN),通过监督学习训练一个小规模(大小为m)的模型。经过良好训练后,给定一个具有m个顶点的TSP实例,该模型能够在边缘上构建热图。然后,尝试将该模型平滑地推广到处理大型实例。为此,在给定大规模TSP实例的情况下,反复使用图采样方法提取具有恰好m个顶点的子图,然后将其转换为标准TSP实例,并调用预训练模型构建子热图。最后,将所有的子热图合并在一起,得到原始图上的完整热图。
- 此外,基于合并的热图,使用基于强化学习的方法,即蒙特卡罗树搜索(MCTS)来搜索高质量的解决方案。这里MCTS方法是一种基于转换的方法,其中每个状态都是一个完整的循环,每个动作将当前状态转换为一个新的完整循环。
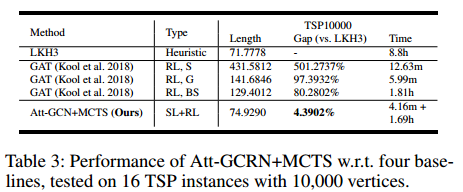
- 结果:能解规模10000。
方法
预先工作
给定无向图 $G(V;E)$,其中 $\mid V \mid = n$,热图定义为一个 $n\times n$ 的矩阵 $P_{ij}\in[0,1]$,表示 TSP 解中包含这条路径的概率。
首先通过训练一个具有注意力机制的图卷积残差神经网络(Att-GCRN),输入大小固定为 $m$,训练集大小为 990000,标签为 Concorde 求解器得到的解。
Pipeline
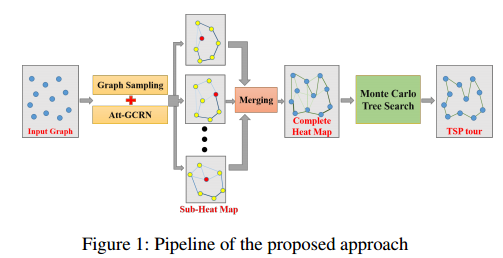
给定任意大尺寸的 TSP 实例,求解该实例的流程如图所示,主要包括三个步骤。
- 第一步(离线学习)分别采用图采样的方法从原始图中提取出若干个子图(每个子图恰好由m个顶点组成),然后使用预训练的att - gcrn模型构建每个子图对应的子热图。
- 第二步尝试将所有的子热图合并成一个完整的热图(对应于原始图)。
- 第三步使用强化学习方法(在线学习),即蒙特卡罗树搜索(MCTS),在合并热图中存储的信息的指导下,搜索高质量的TSP解。
构建和融合热图
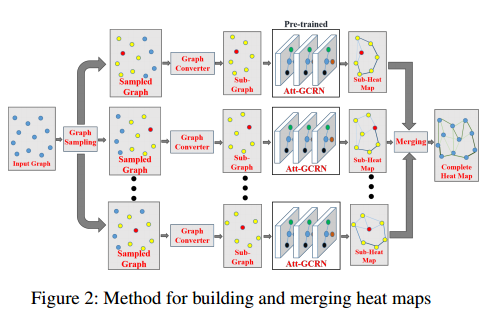
图采样
令 $O_i$ 或者 $O_{ij}$ 表示节点 $i$ 或者边 $ij$ 被采样的次数。
每次采样,选择 $O_i$ 最小的节点,如有相同随机选一个,将他作为聚类中心,使用KNN算法采样出一个具有 $m$ 个节点的子图,然后更新 $O_i$。
终止条件,最小的 $O_i$ 达到阈值 $\omega$。
图转化
训练集的所有节点都在一个正方形内,为了保证提取的节点也符合这个分布,需要进行转换。
公式就不列了,其实就是根据横纵坐标的 min 和 max 进行相应的拉伸。
构建子热图
用Att-GGRN。
融合子热图
重复以上几个步骤,可以得到 $I$ 个子热图。对于原始图像中的一条边 $(i,j)$,构建一个概率 $P_{ij}$ 表示最终这条边属于 TSP 解的概率
\[P_{ij}=\frac{1}{O_{ij}}\times \sum_{l=1}^{I}P^{\prime\prime}_{ij}(l)\]$P^{\prime\prime}_{ij}(l)$ 表示第 $l$ 个子热图中 $(i,j)$ 的概率。其实就是加权平均。
最后将 $P_{ij}<10^{-4}$ 的边设置为 0。
强化学习用于解优化
马尔可夫决策过程
基于热图,采用强化学习搜索高质量的解决方案。
-
状态,一个解 $\pi=(\pi_1,\pi_2,\cdots,\pi_n)$
-
动作 $a$,将 $\pi$ 转换成 $\pi^\ast$。一个动作其实是一个 k-opt,即删除 k 条边,再新增 k 条边。
具体可以表示成,$a=(a_1,b_1,a_2,b_2,\cdots,a_k,b_k,a_{k+1})$,表示
- $a_1=a_{k+1}$
- 删除 $k$ 条边 $(a_i,b_i)$
- 加入 $k$ 条边 $(b_i,a_{i+1})$
- $b_i$ 不是可选的,一旦 $a_i$ 确定,$b_i$ 唯一确定。
这样,一个 k-opt 可以被拆解成 k 个动作,即选择 k 个 $a_i$。
值得注意的是,一些 $P_{ij}<10^{-4}$ 不在 $(b_i,a_{i+1})$ 的动作空间内。
-
奖励,两个解的 tour length 差值。
这样设计保证了:
- 动作空间从 2k 下降为 k;
- 结果必然是可行解。
初始解
从一个随机点出发,根据 $P_{ij}$ 采样下一个节点。
扩大邻域内的目标采样
当小邻域没有可以改进的方案时,扩大 k。
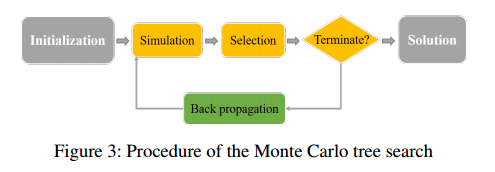
按照这个思路,选择蒙特卡洛树搜索作为学习框架。
-
初始化:定义两个 $n\times n$ 的矩阵,权重矩阵 $W_{ij}=100\times P_{ij}$ 控制在 $i$ 之后选择 $j$ 的概率,访问矩阵 $Q_{ij}=0$ 记录沿 $(i,j)$ 模拟时选择的值;变量 $M=0$ 记录已经模拟的操作总数。
-
模拟:动作 $a=(a_1,b_1,a_2,b_2,\cdots,a_k,b_k,a_{k+1})$ 包含一系列决策 $a_i$,一旦 $a_i$ 确定,$b_i$ 会被唯一确定;而一旦 $b_i$ 确定,可以根据可能性矩阵 $Z_{b_ij}$ 选择边 $(b_i,j)$(值越大,选择概率越高)
\[Z_{b_i j}=\frac{W_{b_i j}}{\Omega_{b_i}}+\alpha \sqrt{\frac{\ln (M+1)}{Q_{b_i j}+1}}\]其中
\[\Omega_{b_i}=\frac{\Sigma_{j\neq b_i}W_{b_ij}}{\Sigma_{j\neq b_i}1}\]表示所有与 $b_i$ 相连的边的权重矩阵平均值。
等式的第一部分强调了权重的重要性,第二部分更 倾向于更少检查的边,$\alpha$ 用于强化和多样性之间的平衡参数。
决策顺序为:
-
随机选择 $a_1$,被删除的边 $b_1$ 被唯一确定;
-
如果决策长度足够,则 $a_{i+1}=a_1$;否则,考虑 $W_{b_ij}\geq 1$ 的顶点作为候选顶点集合 $X$,在候选集合中根据 $P_j$ 选择 $j$ 作为 $a_{i+1}$
\[P_j=\frac{Z_{b_ij}}{\Sigma_{l\in X}Z_{b_il}}\]一旦 $a_{i+1}=a_1$,或者动作数量达到上限,就终止。
-
-
选择:在上述仿真过程中,如果满足改进动作,则选择改进动作并应用于当前状态 $\pi$,得到新的状态 $\pi^{new}$。否则,如果采样池中不存在这样的动作,那么在当前搜索区域内似乎很难获得改进。然后,MDP跳转到一个随机状态(使用上面描述的状态初始化方法),该状态作为一个新的起始状态。
-
反向传播:$M,Q,W$ 都需要被更新。
-
当一个动作被检查,$M+1$;
-
当一个边 $(b_i,a_{i+1})$ 被检查,$Q_{b_ia_{i+1}}+1$;
-
当状态 $\pi$ 被修改成更好的 $\pi^{new}$,对于动作中的每一个 $(b_i,a_{i+1})$,更新
\[W_{b_i a_{i+1}} \leftarrow W_{b_i a_{i+1}}+\beta\left[\exp \left(\frac{L(\boldsymbol{\pi})-L\left(\boldsymbol{\pi}^{n e w}\right)}{L(\boldsymbol{\pi})}\right)-1\right] .\]其中 $\beta$ 控制增长率。
-
$Q,W$ 是对称矩阵。
-
当然不好的 $\pi$ 也可能存在好的边,但是为了避免错误的更新,仅当修改为更好的状态的时候才更新。
-
-
终止状态:搜索时间超过了由参数 $T$ 控制的允许时间。
实验
python写的热图构建,C++实现的MCTS,实验设备一个GTX 1080 Ti GPU,一台Intel(R) Xeon(R) Gold 5118 CPU @ 2.30GHz(8核)。
数据集
- set 1:三个子集,每个子集包含10000个规模为 20 50 100 的 TSP 实例;
- set 2:一共 400 个实例,包含 128 个规模为 200 500 1000 以及 16 个规模为 10000。
超参数
采样子图大小 $m=20/50$ 分别对应 set 1 和 set 2。
每条边采样次数 $\omega=5$。
参数 $\alpha=1,\beta=10,H=10n$。
MTCS 时间 $T=10n/40n$ 毫秒分别对应 set 1 和 set 2。
结果
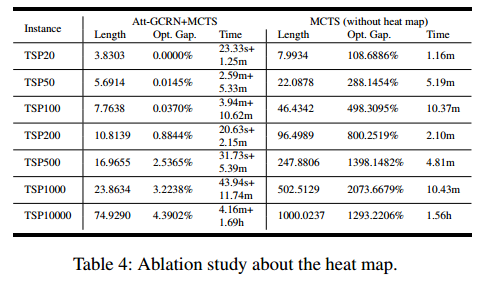
消融实验
把 Att-GCRN消去,变成每条边概率相等。