A Subpath Ejection Method for the Vehicle Routing Problem
1998 Institute for Operations Research and the Management Sciences
里斯本大学
省流
结合 TSP Ejection Chains,以下是省流版本。
摘要
在 CVRP 下的弹射链方法。采用 Flower reference structure。方法基于在弹射链构造过程中创建交替路径和循环的基本性质。文章提出了一种基于禁忌搜索框架的新算法,结果表明该算法可能是VRP最佳启发式算法的一个很好的替代方案。
介绍
图 $G=(V,A),V=\lbrace v_0,\cdots,v_n\rbrace$,$A$ 是弧的集合,$v_0$ 是仓库。距离矩阵 $C=(c_{ij})$。有若干辆车,车数是一个决策变量,每辆车的容量是 $Q$,节点的运货量是 $q_i$。
该问题的拓展是,卸货需要 $\delta_i$ 的时间,车辆的持续时间不得超过 $D$。
本研究基于禁忌搜索,基本贡献是考虑基于子路径弹出链方法的新邻域结构,用于生成从一个解到一个新解的动作。
子路径弹射方法
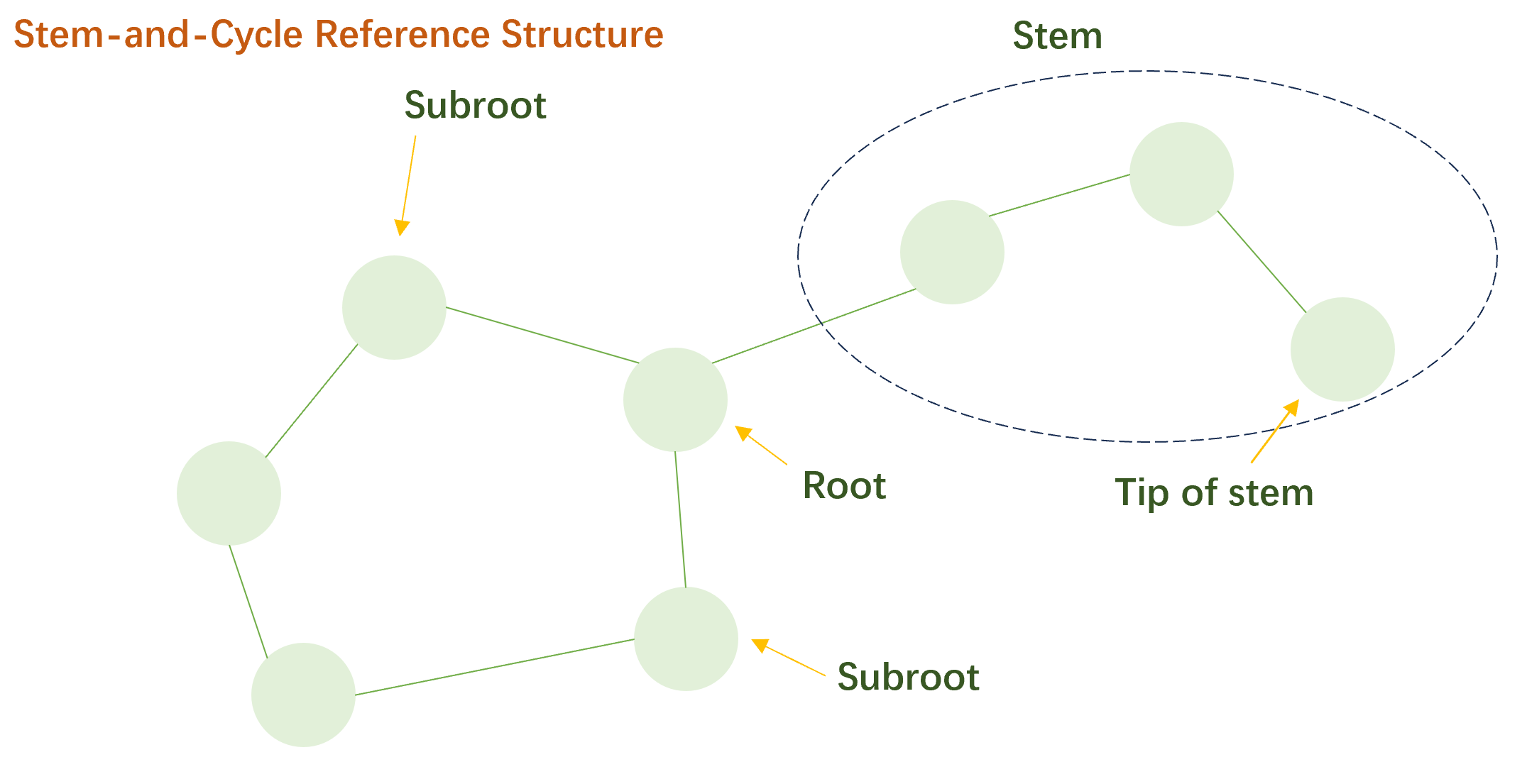
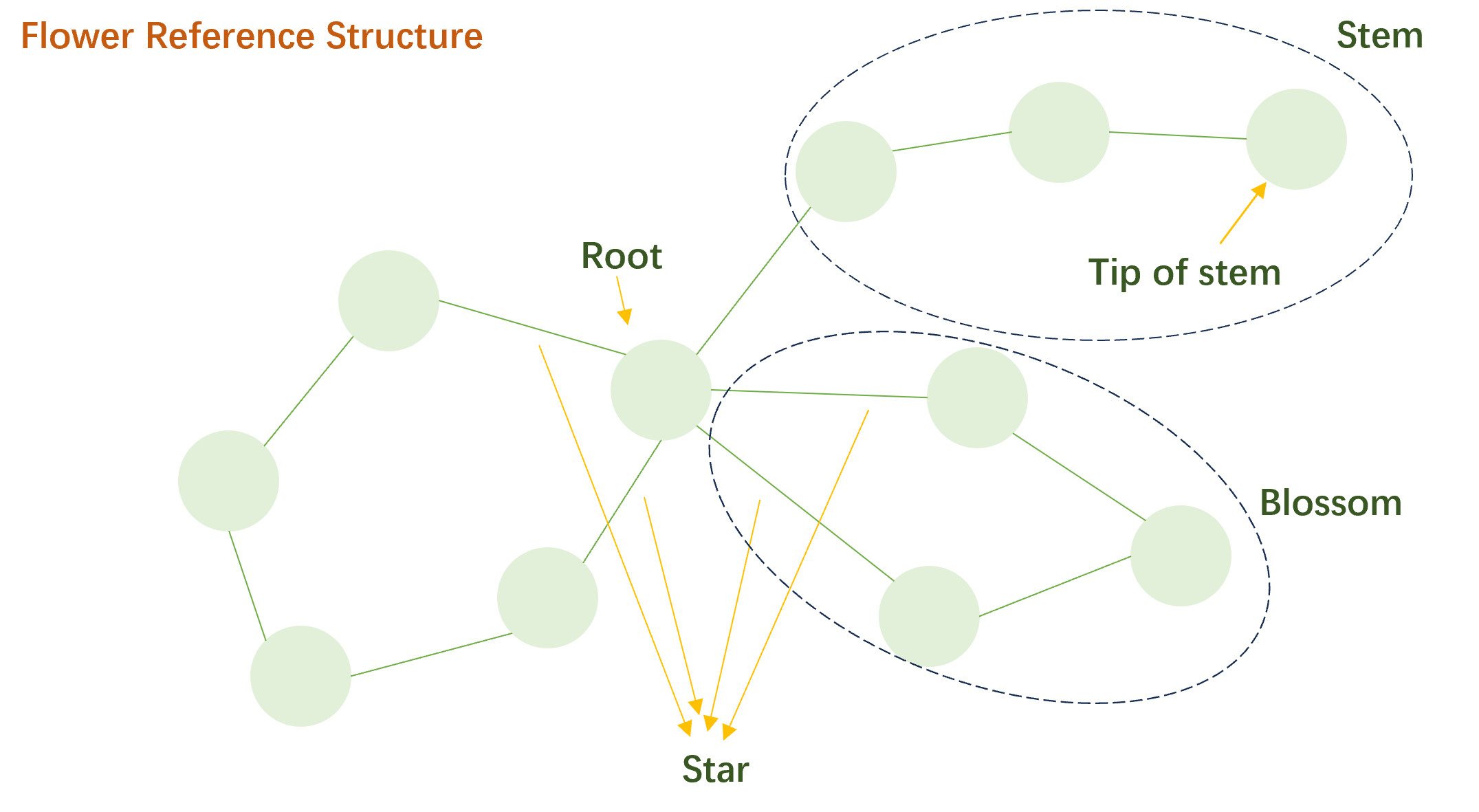
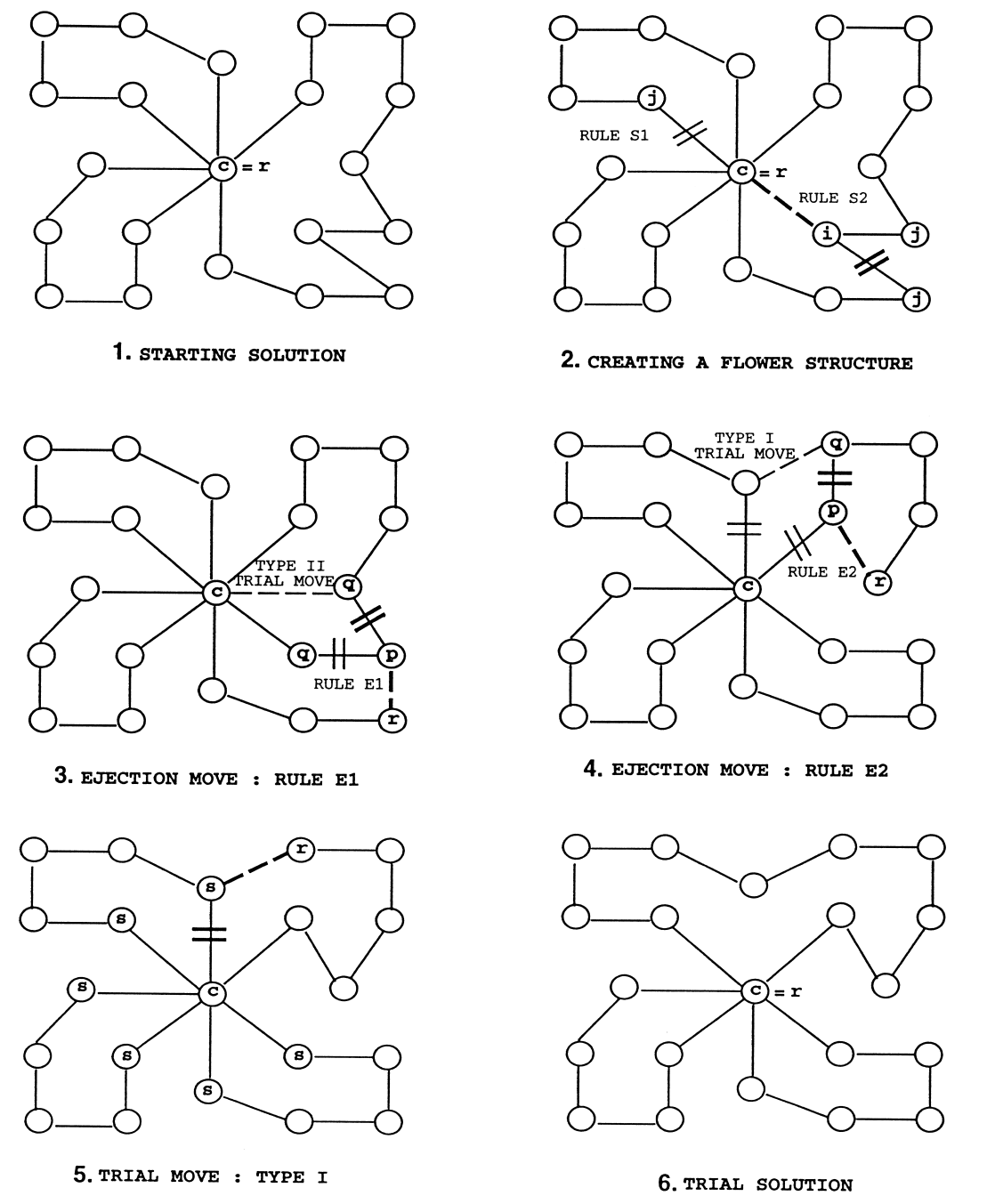
The Flower Reference Structure
茎:子路径 $(v_r,\cdots,v_c)$,$v_r$ 是 root,$v_c$ 是 flower core,$v_r,v_c$ 之间的点都只属于一条路径,称之为 blossom。
star:blossom 中的边集 $(v_c,v_s)$
简单来说
- 茎表示从 flower core 连出去的一条链,链的另一个端点叫做 root
- blossom 表示从 flower core 的一个环,
- star 就是其中一个端点是 flower core 的边集
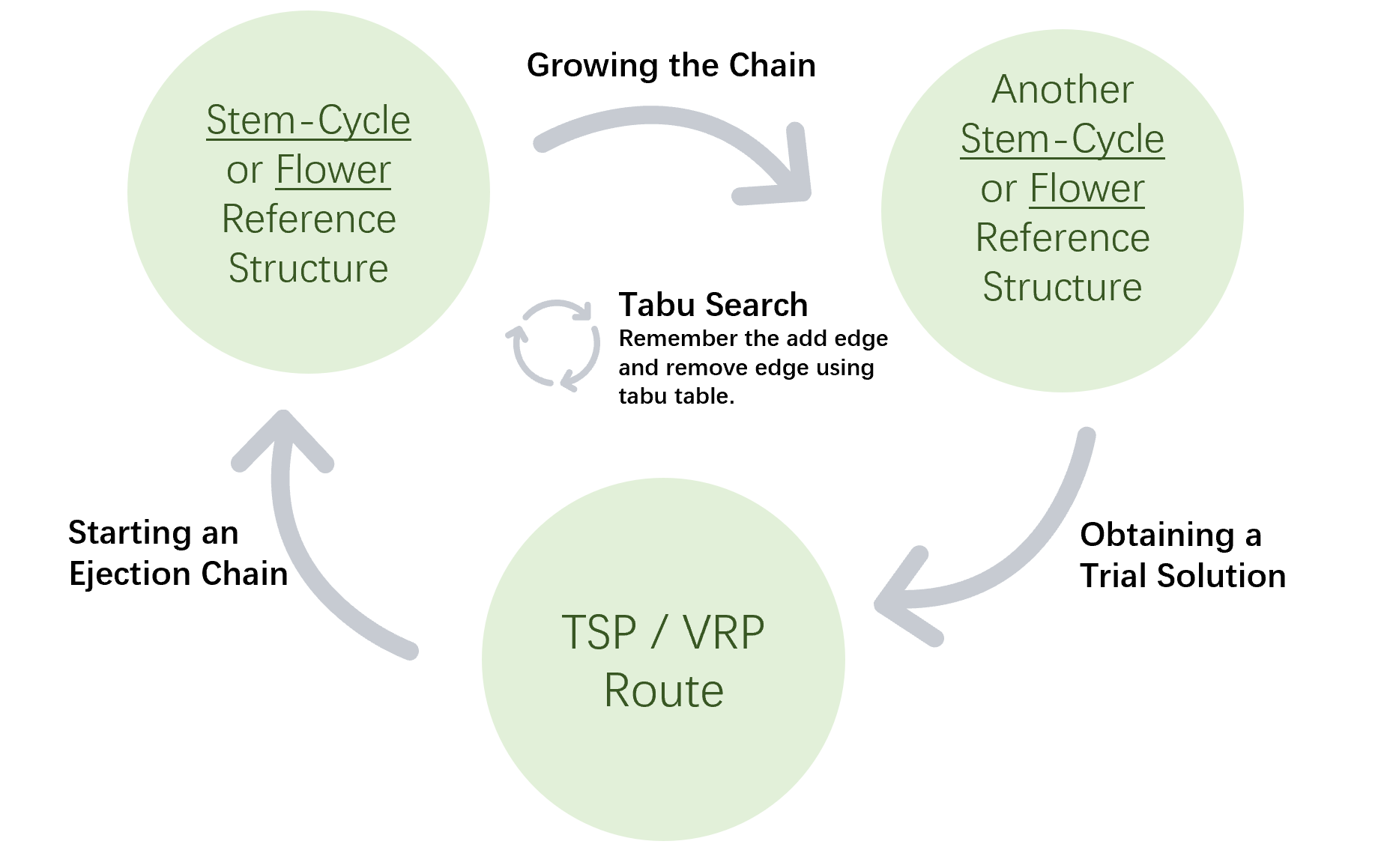
一个弹出链过程,描述为,在每一步,一个路由的子路径以一个茎的形式弹出。
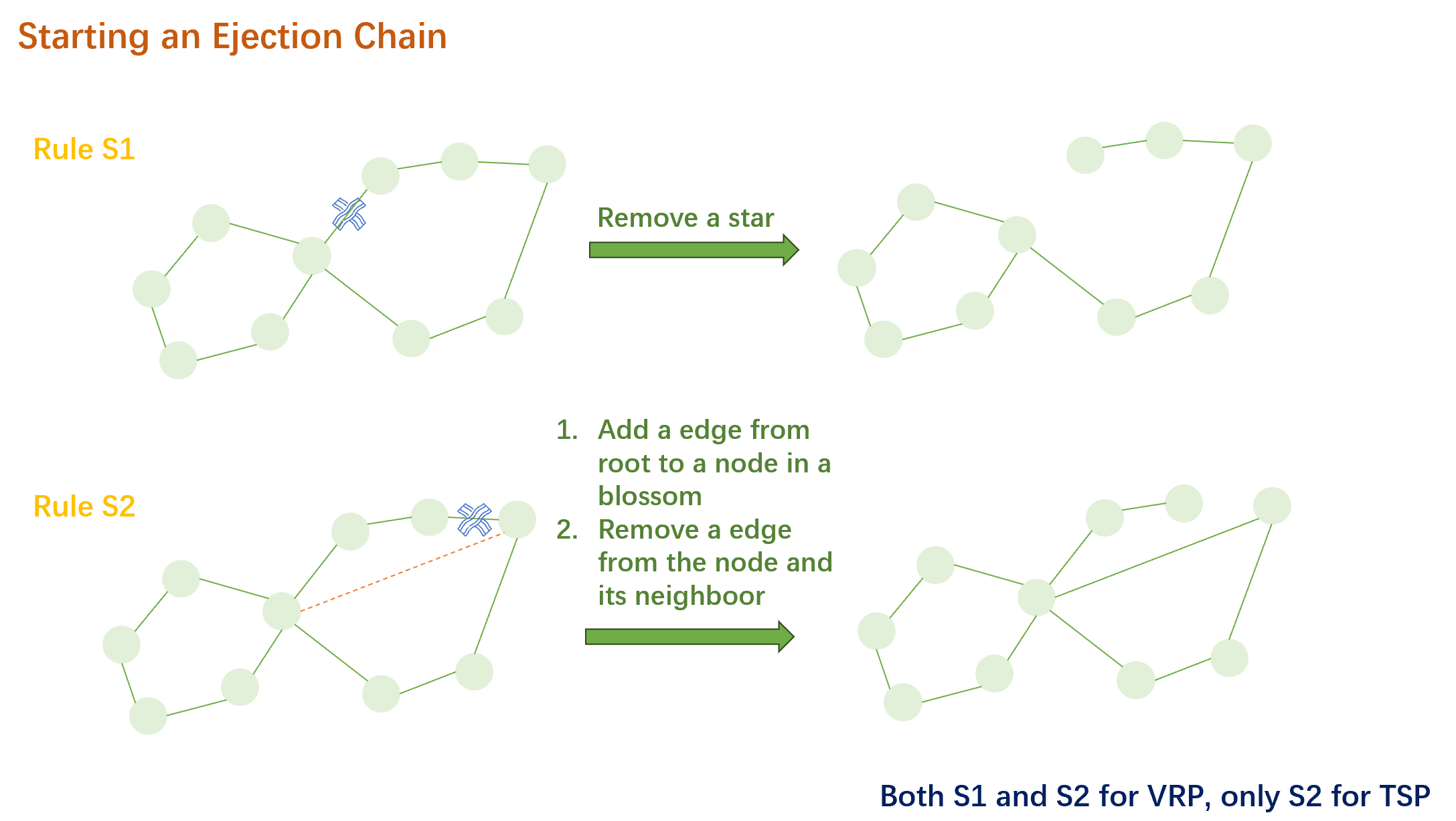
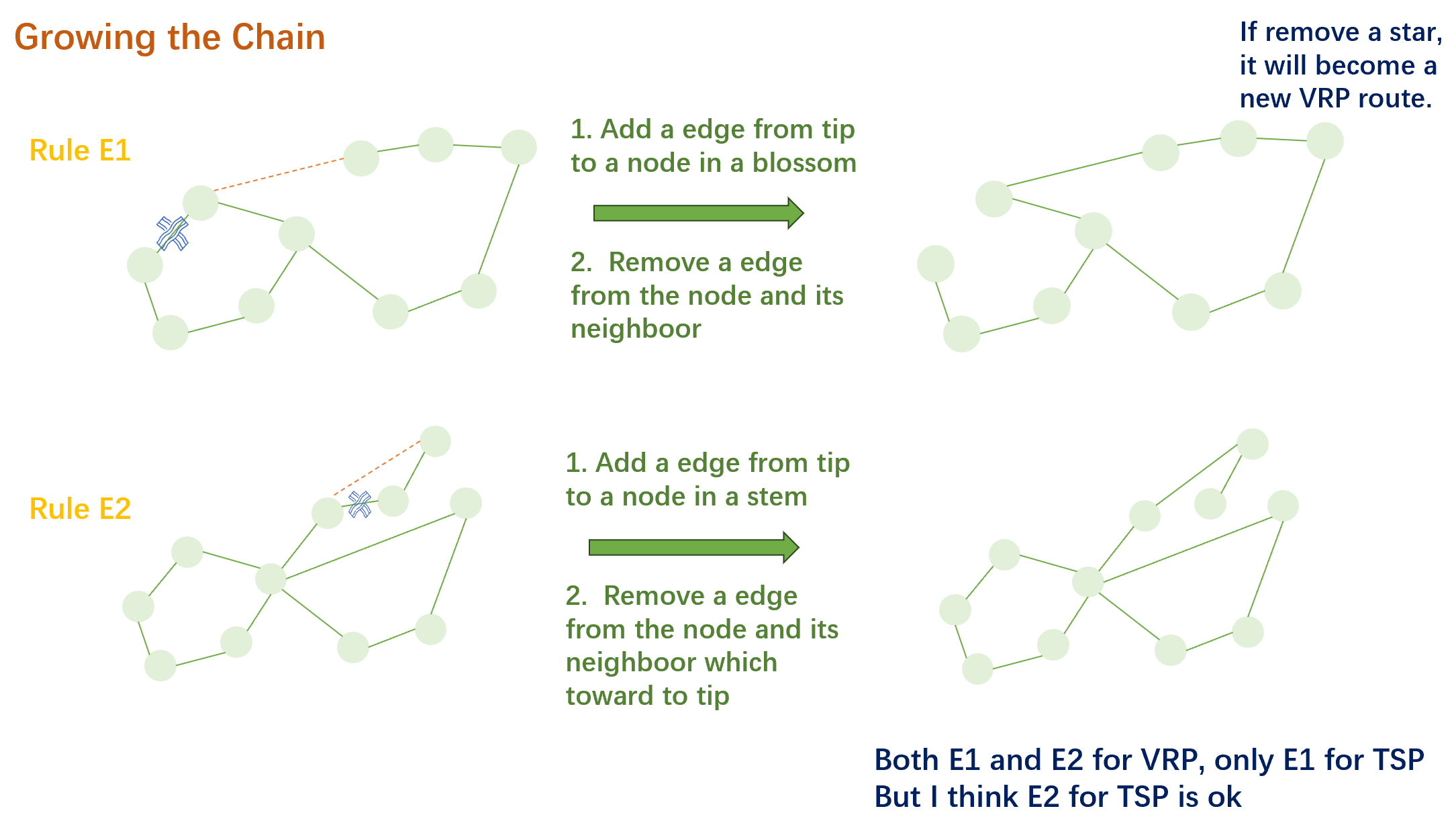
图解中,虚线表示可以插入的边,平行线表示可以删除的边,加粗的表示实际选择插入或者删除的边。
首先要让 VRP 解变成带有一个 stem,其他都是 blossom 的形状。
初始解规则
- rule S1:如图2,为了处理包含单个城市的路线,以及减少给定解的路线总数,可以通过简单地删除属于 star 的边 $(v_c,v_j)$ 来获得花结构,从而将 cycle 转化为 stem。
- rule S2:如图2,插入一条边 $(v_c,v_i)$,其中 $v_i$ 不是 $v_c$ 的相邻顶点,并删除其中一条边 $(v_i,v_j)$,从而将一个 cycle 划分为一个 blossom 和一个 stem(多了一个 star)。
两种方式都能让 $v_j$ 变成 root。
生成链
- rule E1:添加一条边 $(v_r,v_p)$,其中 $v_p$ 属于 blossom。选择一条边 $(v_p,v_q)$ 删掉。如图3,这样 $v_q$ 会变成新的 root。如果 $v_q=v_c$,那么茎是退化的(就没有茎了),包含了一个单个顶点 $v_r=v_c$,包含了一组 blossom。当茎是简并的时候,规则和 S2 相同。
- rule E2:添加一条边 $(v_r,v_p)$,其中 $v_p$ 属于 stem。确定边 $(v_p,v_q)$,使得 $v_q$ 是子路径 $(v_r,\cdots,v_p)$ 上的一个顶点。$v_q$ 变成新的 root。
在生成过程中,root 会一直变,但 core 不会变,core 是仓库。
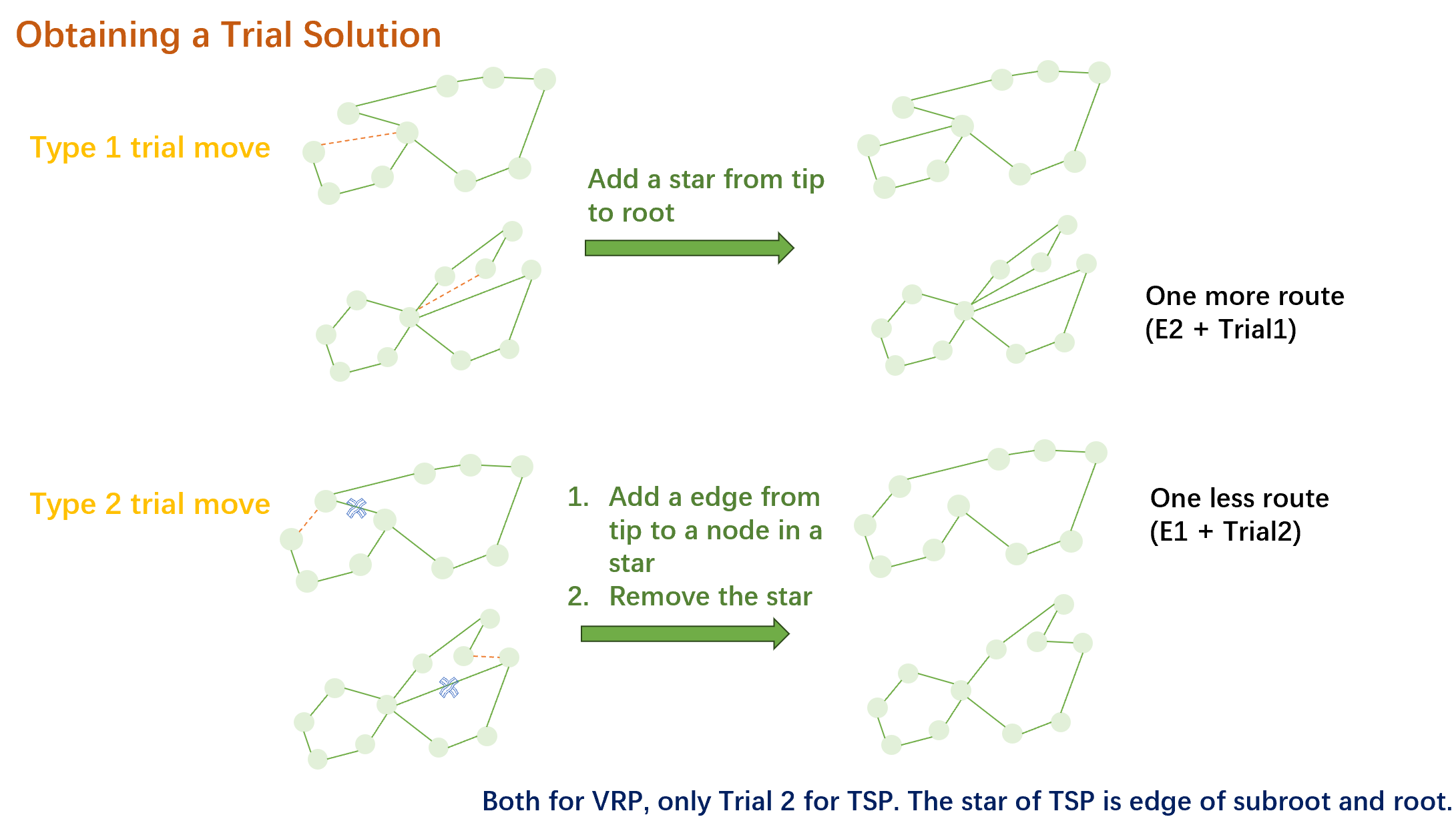
生成可行解
- Type 1 trial move:将当前的 root $v_r$ 连接到 star 的其中一个顶点上 $v_s$,并删除 $(v_c,v_s)$。
- Type 2 trial move:添加 $(v_r,v_c)$。这样会多一条车辆路径。
事实上,车辆路径数量是会变化的
- S1 + type 1 trial move 会减少路径数量
- S2 + type 2 trial move 会增加路径数量
省流
- 生成花茎结构
- 1 删除一个 star
- 2 添加一个 star,并删除 star 的另一个端点连的其中一条边
- 弹射链
- 1 root 朝 blossom 的其中一个点连边,并删除边的另一个端点连的其中一条边
- 2 root 朝 stem 的其中一个点连边,并删除边的另一个端点连的一条边(这条边在这个端点和 root 的路径上)
- 生成可行解
- 1 root 连到一个 star 的一个端点上,并删除另一条边
- 2 root 连 core
交替路径考量
在链的每一级使用规则1和规则2有利于生成交替路径,但不能保证交替序列的添加和删除边。举个例子,当 $v_q$ 成为新的 root $v_r$ 可以保证从 $v_r$ 添加的边不在当前解中,但是可以会发生这样一种情况,选择下一个顶点 $v_q$($v_r$ 将与之相连)会导致删除一条边(与新顶点 $v_q$ 相邻),这条边与另一条不在当前解中的边相邻。
交替路径的考量是:对于局部搜索算法在给定迭代中的解,并非所有边都是“错误的”,即只有一些边不属于最优解。有理由怀疑错误的边在解中是分散的,而不是在解子图的给定区域中定位或聚集。如果只在小范围内改动,一方面这样会非常依赖初始解,另一方面这样无法避免陷入局部最优。
交替路径方法可以避免相邻边在算法的同一步骤同时被修改,但不应该完全禁止。
算法
两级 tabu search。
底层 tabu search 通过一个禁忌表,控制被删的边不会被加回来。每个点有一个邻域,定义为最接近它的 $h$ 个节点的集合。对于每个规则的选择,通常在贪心的基础上,增加一个系数来控制不总是选择贪心的策略。算法复杂度 $O(n^2)$。
高层 tabu search 类似 $\varepsilon$ greedy,通过每条边删除和添加的频率,以及一个系数来进行乘法。